
طراحی کنترل کننده فازی جهت کنترل مکانیزم اعمال نیرو در تجهیزات سختی سنج
در این مقاله یک کنترل کننده فازی (Fuzzy Controller) مناسب جهت کنترل نیرو در تجهیزات سختی سنج طراحی می شود. استفاده از کنترلر فازی با توجه به مشخص نبودن مدل سیستم و وجود عدم قطعیت ها با سرعت پاسخ مناسبی همراه بوده و دقت نیرو اعمالی بسیار مطلوب می باشد.

چکیده
در این مقاله یک کنترل کننده فازی (Fuzzy Controller) مناسب جهت کنترل نیرو در تجهیزات سختی سنج طراحی می شود.
برای تحقق بخشیدن به این امر، ابتدا کنترل کننده فازی را با توجه به رفتار تجربی سیستم طرح نموده سپس برای اطمینان از صحت عملکرد و برتری نسبت یه کنترلر های دیگر در محیط SIMULINK نرم افزار MATLAB شبیه سازی شده و خروجی با یک کنترلر PID مقایسه می شود. نتایج نشان می دهد که استفاده از کنترلر فازی با توجه به مشخص نبودن مدل سیستم و وجود عدم قطعیت ها با سرعت پاسخ مناسبی همراه بوده و دقت نیرو اعمالی بسیار مطلوب می باشد.
مقدمه
دستگاه های تست سختی کاربرد گسترده ای در متالوژی و صنایع مختلف دارند. در دستگاه های سختی سنجی یک قطعه به نام ایندنتور که نوک آن از جنس الماس می باشد با نیروی از پیش تعیین شده به جسم مورد آزمایش نیرو اعمال کرده و در آن فرو میرود. با بررسی سطح اثر و عمق نفوذ سختی محاسبه می گردد. این دو عامل شدیدا وابسته به دقت نیروی اعمالی می باشد. در واقع نیروی اعمالی نباید بیش از درصد ناچیزی کمتر یا بیشتر از نیروی تعیین شده از قبل باشد. [۲,۱]
ساختار یک دستگاه سختی سنج به صورت ساده به شرح زیر است.
نیروی لازم توسط یک موتور الکتریکی که معمولا از نوع DC است، ایجاد می شود. این نیرو معمولا با یا بدون واسطه به یک بال اسکرو منتقل شده و آن را به گردش در می آورد. در انتهای بال اسکرو یک مهره قرار دارد که ایندنتر به آن متصل است و با گردش بال اسکرو به بالا یا پائین حرکت می کند و باعث می شود ایندنتر در قطعه فرو رود. جهت اندازه گیری نیرو معمولا از سنسور هایی مانند لودسل استفاده می گردد. لودسل معمولا به همراه ایندنتر و در بالای آن به مهره بال اسکرو متصل می گردد. نیرو توسط یک سیستم میکروپروسسوری اندازه گیری شده و متناسب با آن سرعت موتور الکتریکی کنترل می گردد. (شکل ۱)
شکل (۱) ساختار ساده شده دستگاه سختی سنج
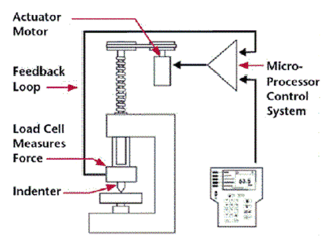
چنانچه نیروی اندازه گیری شده از نیروی مورد نظر خیلی کمتر باشد موتور با سرعت بیشتری بال اسکرو را می چرخاند و به تدریج که به نیروی مورد نظر نزدیک می شود سرعت موتور نیز کم شده تا در نیروی مورد نظر متوقف شود. مقدار نیروی اعمالی در واحد زمان شدیدا وابسته به سختی خود جسم مورد آزمایش می باشد. چنانچه سختی زیاد باشد ممکن است در لحظات اول برخورد ایندنتور به قطعه نیرو دچار Overshoot گردد. جهت جلوگیری از این مشکل با استفاده از سیستم فنر نیروی اعمالی تعدیل می شود [۳]. در این حالت تا حدودی از Overshoot جلوگیری می شود و زمان رسیدن به نیروی مورد نظرآزمون افزایش می یابد. بنابراین باید سرعت توسط اعمال نیرو توسط یک سیستم کنترلی دقیق کنترل گردد.
با بررسی سیستم انتقال نیرو در می یابیم که سرعت تغییرات نیروی اعمالی مستقیما به سرعت موتور الکتریکی وابسته می باشد. مجهول بودن میزان سختی قطعه مورد آزمایش مدل سازی دقیق سیستم را با مشکل مواجه می کند. در واقع با توجه به فیدبک نیرو بنظر می رسد بتوان از مدل کردن سیستم موتور، بال اسکرو و فنر صرف نظر نمود و با اندازه گیری نرخ تغییرات نیرو ، سیستم را جهت اعمال نیروی مناسب کنترل نمود.
نیروی اعمالی باید توسط یک سیستم کنترل گر به صورت دقیق کنترل گردد تا شرایط اولیه آزمون فراهم گردد. دقت در اعمال نیرو درنتایج به شدت تاثیر گذار است. روش های مختلفی جهت کنترل نیرو مانند PID ،مد لغزشی ، فازی و … شناخته شده است. ولی از طرفی با توجه به تلورانس قطعات مکانیکی به کار رفته مانند ظریب فنر، کیفیت موتور و پارامتر های آن و همچنین نا مشخص بودن میزان سختی و ضریب الاستیسیته قطعه مورد آزمایش که مدل کردن سیستم را بامشکل مواجه می کند کنترلر هایی مانند PID در شرایط گوناگون ممکن است با شکست مواجه شوند. کنترل فازی برای این منظور مناسب به نظر می رسد و می تواند جایگزین سیستم های قدیمی گردد.
مجموعه های فازی اولین بار توسط پروفسور لطفی عسگر زاده در سال ۱۹۶۵ رساله ای به نام « مجموعه های فازی – اطلاعات و کنترل » معرفی گردید[۴] و در دهه ۱۹۷۰ رشد و کاربرد عملی پیدا کرد. منطق فازی روش مناسبی برای طراحی کنترلر های سیستم های غیرخطی و یا سیستم هایی که مدل سازی آن ها داری عدم قطعیت می باشد است. در واقع در طراحی کنترلر های فازی بر خلاف کنترلر های مدرن و کلاسیک نیازی به مدل دقیق سیستم نیست. کنترلر های فازی درزندگی امروزی کاربرد گسترده ای پیدا نموده اند [۵,۶]. کنترل کننده های فازی با استفاده از منطق فازی، منطق بشری را پیاده کرده است که با توابع عضویت، قوانین فازی و قوانین عضویت برنامه ریزی شده است.
در سال ۱۹۷۵ سیستم استنتاج ممدانی توسط ممدانی و اسیلیان پیشنهاد گردید [۷]. این سیستم ها به دلیل داشتن طبیعت بصری و تفصیری از قوانین می توانند به طور گسترده ای در سیستم های پشتیبانی تصمیم استفاده شوند.
سیستم های فازی را هم میتوان به صورت حلقه باز و هم به صورت حلقه بسته به عنوان کنترلر مورد استفاده قرار داد. کنترلر های فازی زمانی که سیستم مورد نظر بسیار پیچیده بوده و تجزیه و تحلیل آن دشوار باشد کارایی خود را بیشتر نشان می دهد. ماشین لباسشویی، دستگاه های تهویه مطبوع، بخش های کنترلی مختلف در اتومبیل نمونه هایی می باشند که در آن ها کنترلر های فازی جهت بدست آوردن کنترلی مقاومتر و سریعتر جاسازی شده است.
یکی از کاربرد هایی که کنترلر فازی می تواند جایگزین روش های کنترلی سنتی گردد در سیستم هایی است که نیاز به کنترل دقیق نیروی اعمالی می باشد.
در این پژوهش با توجه به موارد ذکر شده در مورد دقیق نبودن مدل سیستم و عدم قطعیت پارامترها در دستگاه سختی سنج به کنترل نیرو در ابزار های سختی سنج با استفاده از کنترلر فازی خواهیم پرداخت. در بخش دوم مقاله به معرفی سیستم های فازی می پردازیم. در بخش سوم در باره کنترلر های فازی و اجزای آن بحث می کنیم. در ادامه در بخش چهارم یک نمونه کنترلر فازی طراحی می کنیم و توسط شبیه ساز SIMULINK عملکرد آن را شبیه سازی می کنیم. در بخش پنجم نتیجه خروجی کنترلر فازی را مورد ارزیابی قرار می دهیم.
2- سیستم های فازی
یکی از روش های کنترلی که در سال های اخیر فکر دانشمندان علوم کنترل را به خود مشغول داشته، طراحی سیستم هایی است که بتواند از توانائی های انسان در حل مسائل پیچیده تقلید کند. سیستم هایی که قادر باشند در برخورد با پیچیدگی ها و عدم قطعیت هایی که در یک محیط واقعی وجود دارند بر اساس درک داده هایی که به جای ارزش عددی، ارزش کیفی دارند. انجام پردازش هایی بر روی آن ها عملکردی بهینه از خود ارائه دهند در این رهگذر روش های کنترلی نوینی ارائه شده که از جمله آن ها، سیستم های کنترلی مبتنی بر ریاضیات و منطق فازی می باشند. سیستم های فازی بر اساس ایده مجموعه های فازی استوار است. یک مجموعه فازی مشابه مجموعه های معین از تعدادی عنصر تشکیل شده است که در آن مرز قطعی بین عضویت و عدم عضویت عناصر وجود ندارند. به عبارت دیگر یک عنصر می تواند به اندازه یک عدد بین صفر تا یک عضو یک مجموعه فازی باشد. مجموعه فازی را به صورت زیر نمایش می دهند.

درمجموعه فازی x مجموعه مرجع و µA(x) مقدار عضویت عنصر X که می باشد. در مجموعه های فازی نیز مشابه مجموعه های کلاسیک A عملیات اجتماع، اشتراک و متمم و … برقرار است.
3- کنترل کننده فازی
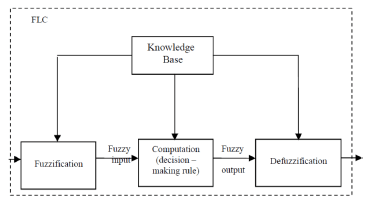
اصولا هر کنترل کننده فازی از چهار قسمت اساسی تشکیل شده که در شکل (۲) در داخل خط چین نمایش داده شده است و عبارتند از: فازی سازی، تصمیم گیری، پایگاه اطلاعات و غیر فازی سازی
شکل (۲) بلوک های سازنده کنترلر فازی
1-3- فازی سازی
عمل فازی سازی بیان کنده نگاشتی از فضای ورودی های مشاهده شده به مجموعه های فازی تعریف شده ( در یک مجموعه مرجع) است. فازی سازی یا کد نمودن مقادیر اندازه گیری شده توسط سنسورها عبارت است از تبدیلی که مقادیر اندازه گیری شده را به عناوین گفتاری به کار رفته در قسمت شرط قوانین فازی تبدیل می کند.
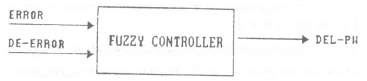
کنترل کننده طراحی شده دراین مقاله مطابق شکل ( ۳) دارای دو ورودی و یک خروجی می باشد سیگنال های ورودی عبارتند از خطای نیرو (e) و تغییرات خطای نیرو (Δe).
شکل ( ۳) کنترلر فازی طراحی شده
2-3- پایگاه اطلاعات
دومین قسمت در طراحی یک کنترل کننده فازی پایگاه اطلاعات می باشد در این قسمت عکس العمل شخص خبره به صورت قوانین فازی بیان می شود این قوانین ارتباط بین ورودی ها و خروج ی ها را مشخص می کند. بنابراین با توجه به تعداد مجموعه های فازی که در قسمت فازی سازی بیان می شود تعداد قوانین فاری مشخص می گردد.
3-3- تصمیم گیری
این قسمت با شبیه سازی تصمیم گیری انسان به وسیله مفاهیم فازی و استدلال تقریبی و نتیجه گیری از قوانین کنترل فازی عملیات کنترلی لازم را تولید می نماید. برای این امر قوانین فازی به صورت یک جدول در حافظه کامپیوتر ذخیره می شود.
تصمیم گیری بر اساس جدول با روش Max-Min انجام می گیرد که در آن اپراتور AND به مفهوم minimum و اپراتور OR به مفهوم Maximum می باشد.
4-3- غیر فازی سازی
با توجه به اینکه سیستم های واقعی با سیگنال های واقعی کار می کنند نه با مفاهیم فازی لذا برای اینکه بتوان نتیجه قسمت تصمیم گیری را به پروسه اعمال نمود باید آن را به یک مقدار قطعی تبدیل کرد که در این کنترل کننده از روش مرکز ثقل جهت غیر فازی سازی استفاده شده است. لازم به توضیح است که مراحل فوق طی یک برنامه کامپیوتری انجام می شود.
4- طراحی و شبیه سازی کنترلر فازی
هنگامی که بخواهیم یک سیستم را با استفاده از تئوری های کنترل کلاسیک کنترل نمائیم نیاز به مدل ریاضی پروسه و اطلاعات دقیقی در مورد تغییرات پارامتر های سیستم داریم تا حلقه کنترلی را ایجاد کنیم. بر خلاف کنترل کننده های کلاسیک که طراحی آن ها بر اساس مدل ریاضیاتی فرایند صورت می گیرد، طراحی یک کنترل کننده فازی بدون دانستن مدل دقیق فرایند و بر اساس دانش و تجربیات افراد خبره انجام می شود. یک کنترل کننده فازی معمولا دارای دو ورودی خطا (e) و تغییرات خطا (Δe) بوده که هدف مینیمم کردن خطا در کمترین زمان ممکن می باشد
شکل (۴) کنترلر فازی در سیستم حلقه بسته
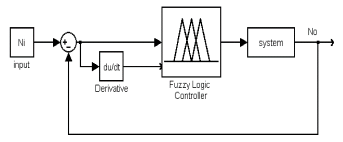
شکل(۵) ساختار کنترلر فازی پیشنهادی
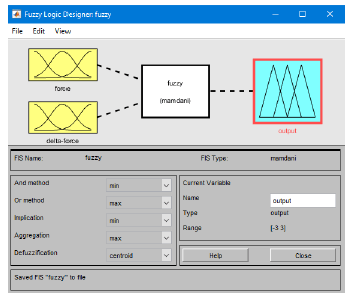
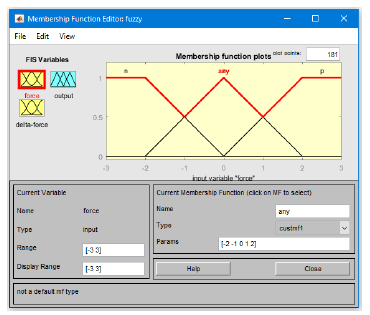
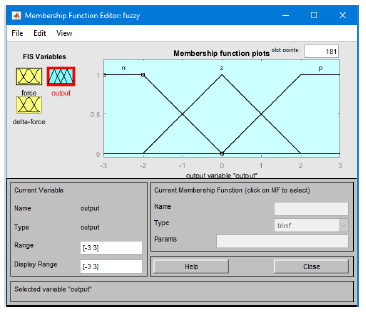
در این مقاله برای کنترل نیرو در فرایند آزمون سختی سنجی در دستگاه سختی سنج یک کنترلر فازی به صورت حلقه بسته مطابق شکل ۴ طراحی شده و سپس جهت اطمینان از عملکرد آن و مقایسه با کنترلر PID توسط نرم افزار MATLAB شبیه سازی میگردد. کنترلر فازی پیشنهادی به صورت شکل ۵ می باشد. گام اول در طراحی کنترل کننده فازی، انتخاب توابع عضویت ورودی ها و خروجی می باشد. درجدول ۱ متغیر های مجموعه فازی برای ورودی های کنترلر طراحی شده برای سیستم کنترل نیرو را بیان شده است. شکل ۶ تابع عضویت انتخاب شده برای متغیر های ورودی و شکل ۷ تابع عضویت خروجی را نشان می دهد.
جدول ۱ - تعریف متغیر های مجموعه فازی
N : منفی
P : صفر
Z : مثبت
ANY : اشتراک منفی، صفر، مثبت
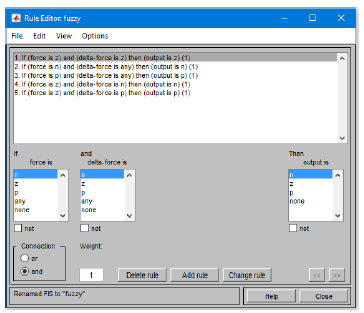
گام بعدی برای طراحی کنترلر فازی انتخاب مناسب قوانین برای موتور استنتاج فازی می باشد. در شکل ۸ مجموعه قوانین فازی نمایش داده شده اند.
شکل(۶) تابع عضویت ورودی های کنترلر فازی
شکل(۷) تابع عضویت خروجی کنترلر فازی
شکل (۸) مجموعه قوانین فازی
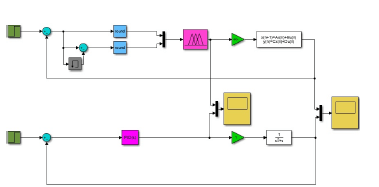
شکل (۹) شبیه سازی کنترلر فازی در محیط SIMULINK
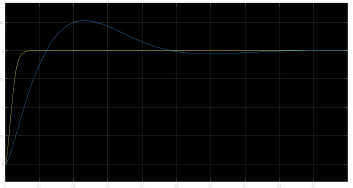
شکل (۱۰) خروجی شبیه ساز
5- نتیجه گیری
بررسی شکل خروجی حاصل از شبیه سازی کنترلر فازی پیشنهادی نشان می دهد که کنترل کننده فازی دارای خطای ماندگار، زمان نشست و اورشوت کمتری نسبت به نوع PID می باشد. علاوه بر این خروجی کنترل کننده فازی در هنگام اعمال پله به سرعت میرا می شود در حالیکه خروجی کنترل کننده PID نوسانانی بوده و به کندی میرا می شود.
منابع:
- مقاله کارشناسی ارشد آقای عمران فضلی (دانشجوی کارشناسی ارشد مکاترونیک، دانشکده فنی و مهندسی گرگان)، و سید محمد شهر آئینی (استادیار، گروه برق، دانشکده فنی و مهندسی گرگان)
فروش انواع دستگاه تست مواد
جهت جهت کسب اطلاعات بیشتر و مشاوره، کارشناسان کوپا پژوهش آماده پاسخگویی به سوالات شما می باشند.
«حتما ببینید»
«جدیدترین و دقیق ترین دستگاه های آزمون خواص مواد را داشته باشید.»
«کوپا بهترین انتخاب برای تجهیز آزمایشگاه است. چون دستگاه های کوپا بسیار پیشرفته اما کاربرپسند، تمام خودکار و مطابق با استانداردهای نوین طراحی و از دقت و قابلیت اعتماد بالایی برخوردار می باشند.»
دستگاه های سختی سنج کوپا
- سختی سنج پرتابل D06
- سختی سنج میکروهاردنس MH4
- سختی سنج یونیورسال UV1
- سختی سنج یونیورسال UV3
- سختی سنج یونیورسال UV4
Aw, this was a very nice post. In concept I would like to put in writing like this additionally – taking time and actual effort to make an excellent article… however what can I say… I procrastinate alot and certainly not appear to get one thing done.
Thanks for your feedback.